Ограничитель скорости лифта


Ограничитель скорости лифта
УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ОГРАНИЧИТЕЛЯ СКОРОСТИ
Область техники
Изобретение относится к подъемно-транспортным машинам, а именно к устройствам контроля скорости кабины лифта или подъемной платформы грузопассажирского вертикального транспорта.
В соответствии с требованиями законодательства о техническом регулировании главным требованием, предъявляемым к машинам и механизмам, является безопасность. Особое значение это имеет для лифтов и других подъемных машин, где любой сбой в работе может привести к трагическим последствиям для человека.
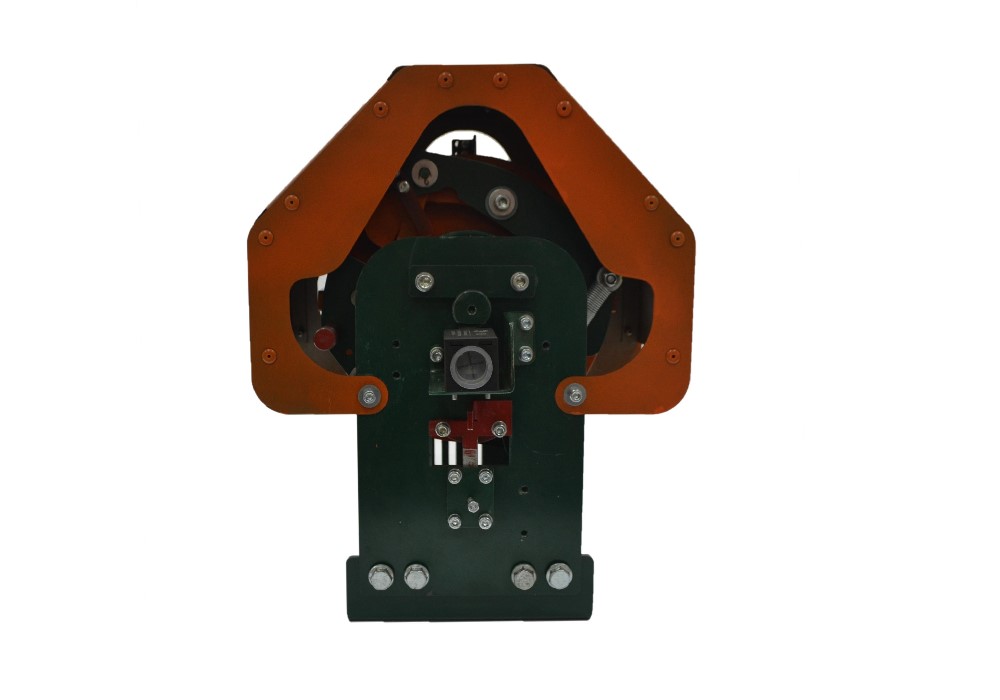
С целью обеспечения контроля за безопасной эксплуатацией указанного оборудования, необходимо иметь специальные устройства безопасности, обеспечивающие это качество. Одним из таких устройств является ограничитель скорости, который предназначен для предотвращения превышения кабиной лифта или подъемной платформой установленного предела скорости при движении. Современные требования государственных стандартов регламентируют необходимость срабатывания ограничителя скорости при движении кабины в любую сторону: либо вниз, либо при движении вверх.
Ознакомиться с конструкцией ограничителя можно в описании патента Untitled (yandex.net)
Тезисы доклада о создании ограничителя скорости опубликованы в сборнике конференции кафедры "Строительные и дорожные машины" ЯГТУ (смюстр.57) 7cf19fc224ec8f3da5d9bdc0be9c3264.pdf - Яндекс.Документы (yandex.ru)
Конструкция ограничителя защищена двумя патентами, в т.ч. патентом на промышленный образец. См.ссылку https://elibrary.ru/tolbgz
Ограничитель скорости лифта. Часть 1. Конструкция. - https://youtu.be/xPNmIBWiU34
Ограничитель скорости лифта. Часть 2. Электронная система безопасности. - https://youtu.be/758n8UvWEiI
Ограничитель скорости лифта. Часть 3. Механическая система безопасности. - https://youtu.be/zLBFEeAPj4w
Ограничитель скорости лифта. Часть 4. Проверка работы. - https://youtu.be/ZeiC0H9qtZk